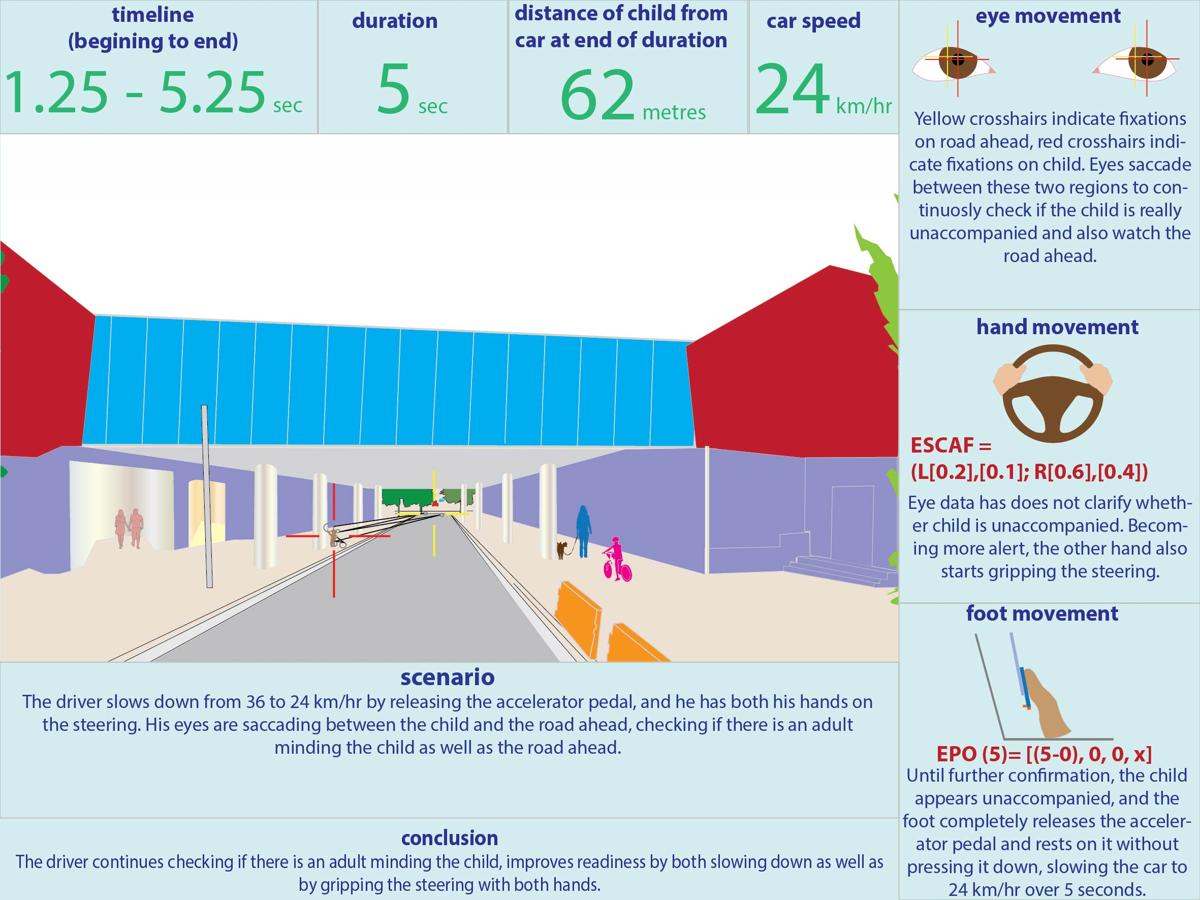
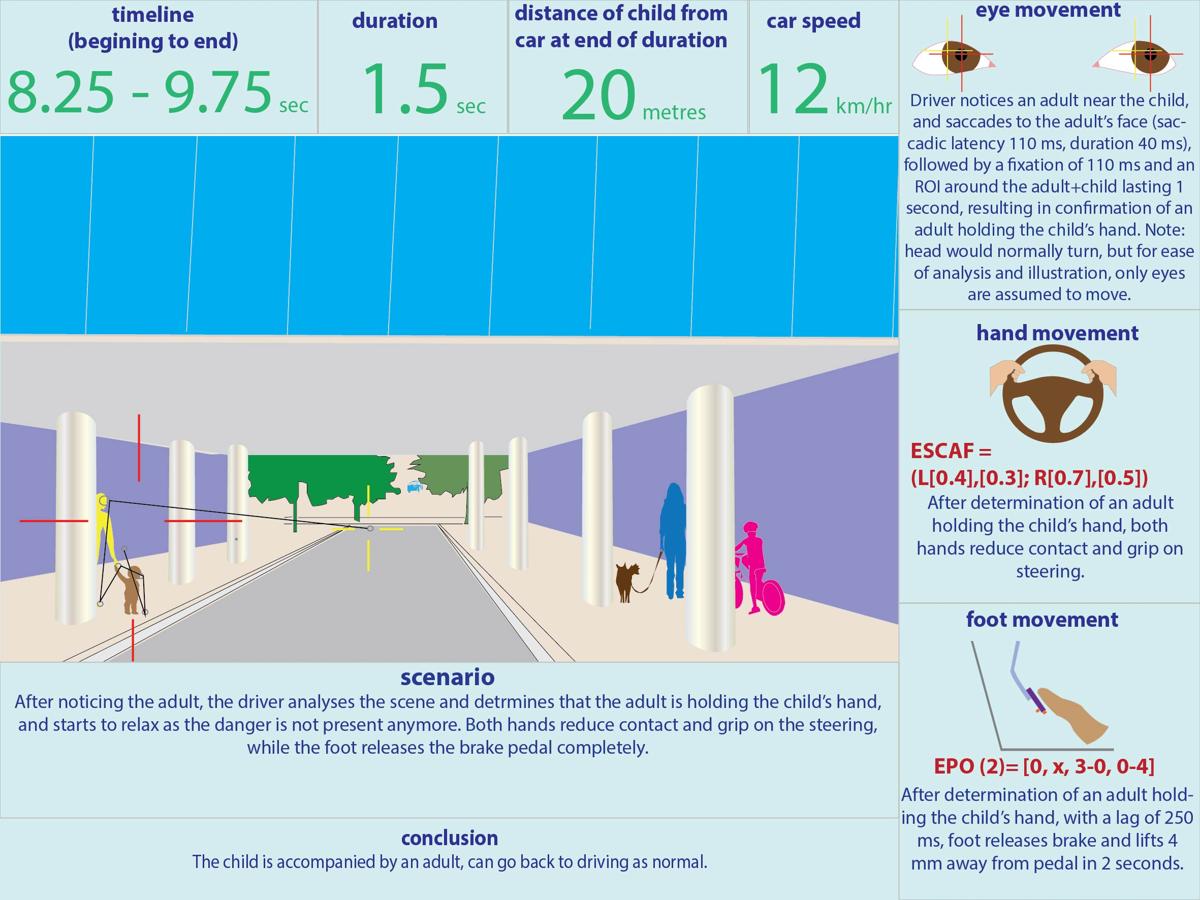
The Signature of this unexpected event includes the following: time, geolocation, distance of the accelerator and brake pedals from the foot as well as the amount of depression of these pedals, hand contact area and grip on steering wheel, eye movement data, scene video captured from the vehicle etc. From this scene video, image portions (like the child, child+adult) are automatically extracted since the eye had formed ROI around these areas. The extracted images are then pattern matched and identified automatically.
This signature is captured, processed, and filed under an “unaccompanied child approaching road” sub-category under main category “Child”. From the foregoing, it can be seen that the driver was being over-cautious. He reduced the speed to 5 km/hr at 50 meters from the child, even though the child was 1.5 meters from the road. However, when data is gathered from a large population of drivers, the average speed at 50 meters from the child would be 20 km/hr, which can be used by an actual AV. The confidence in this signature increases every time the scenario is encountered and captured.
Data formats are easy to implement, and represent the real-world (not academic)
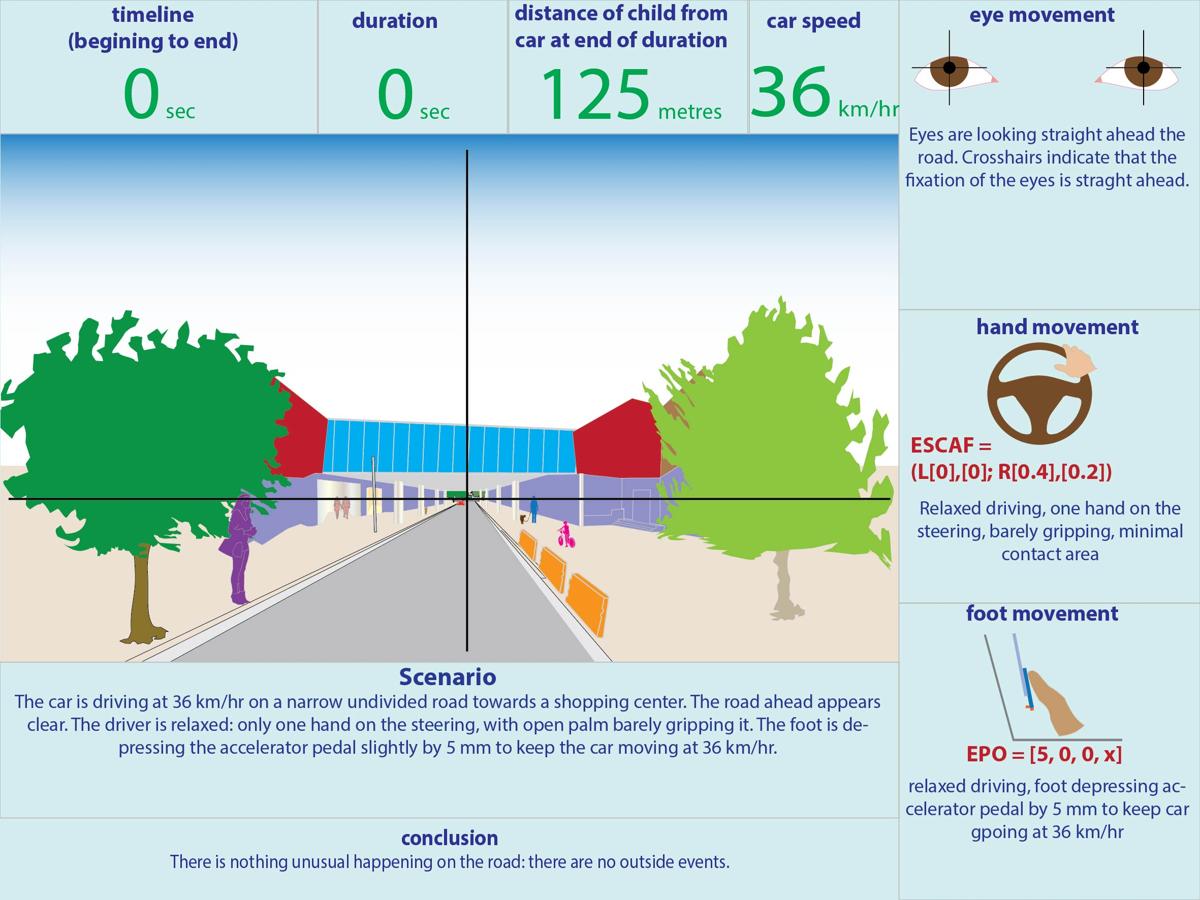
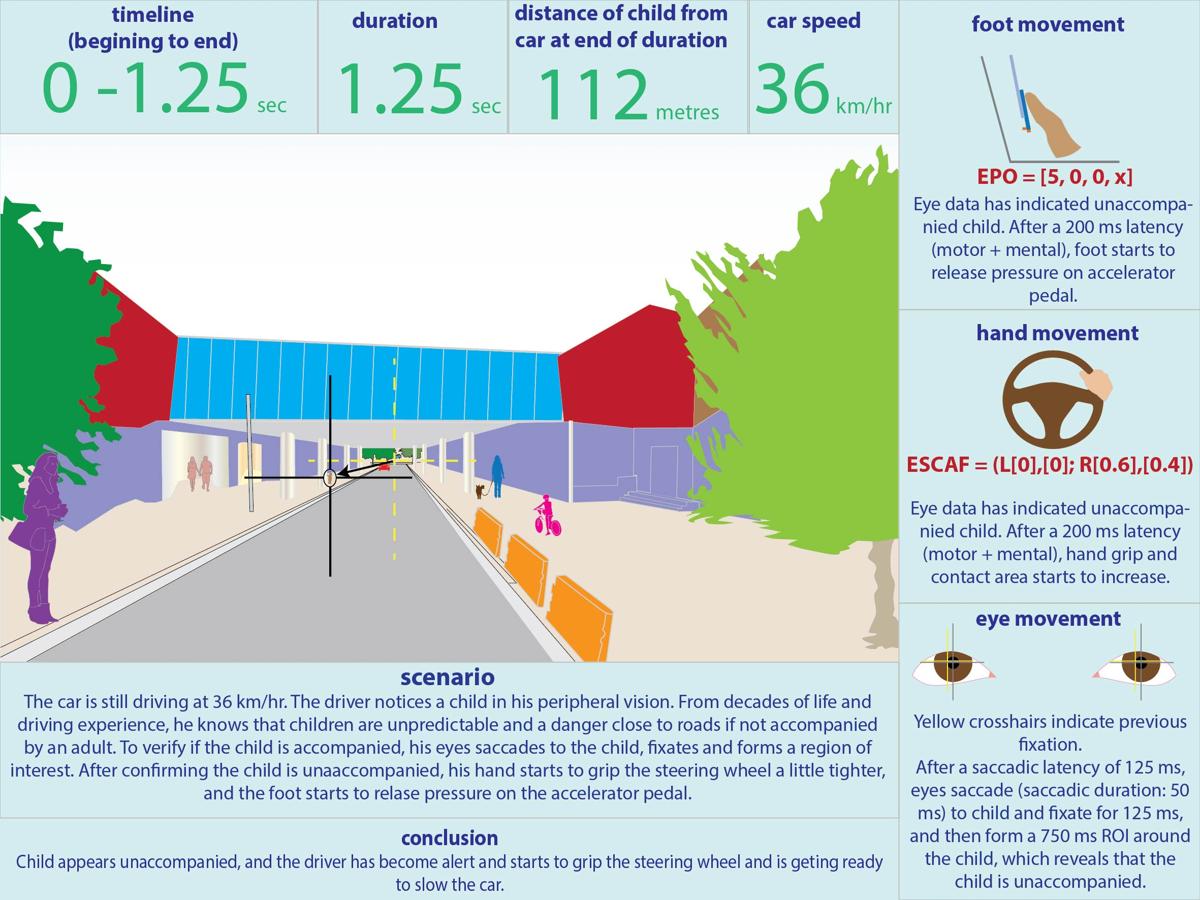
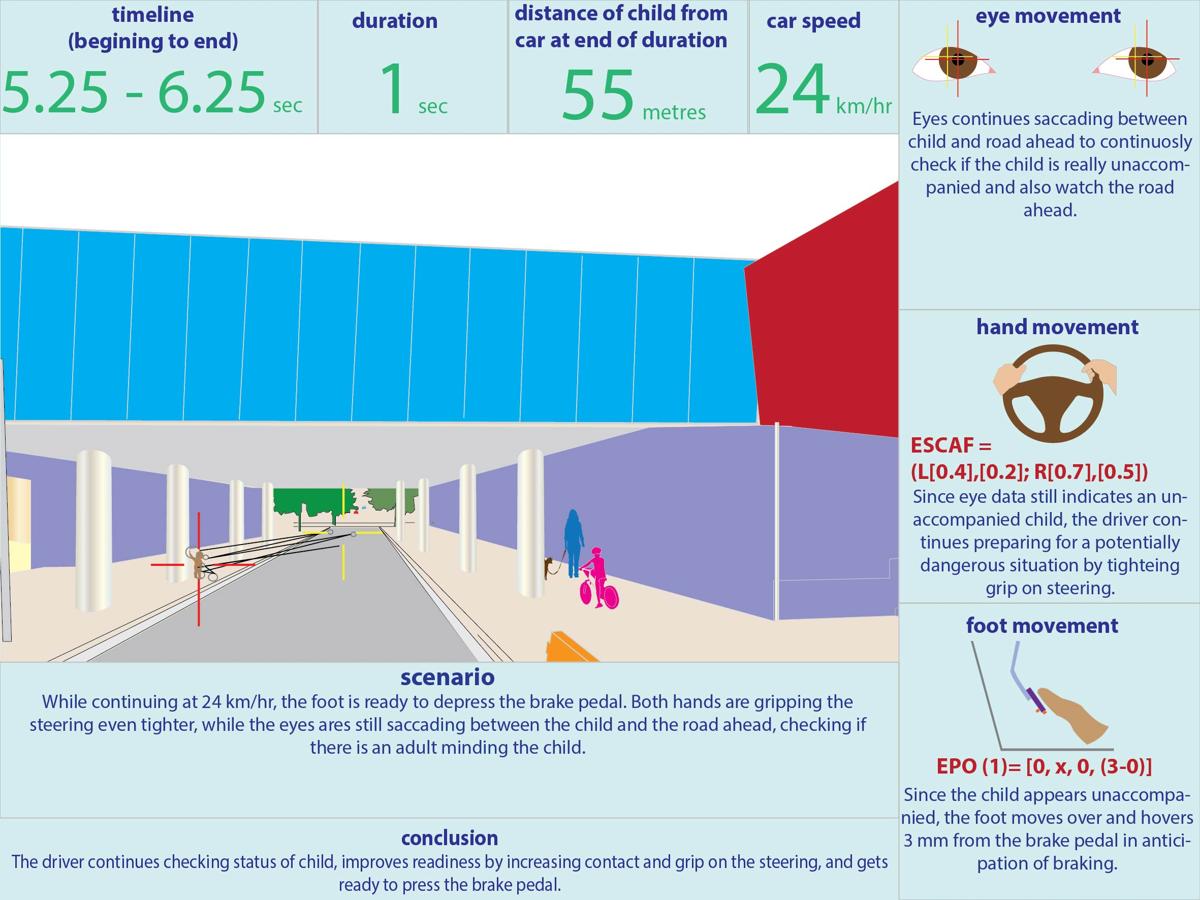
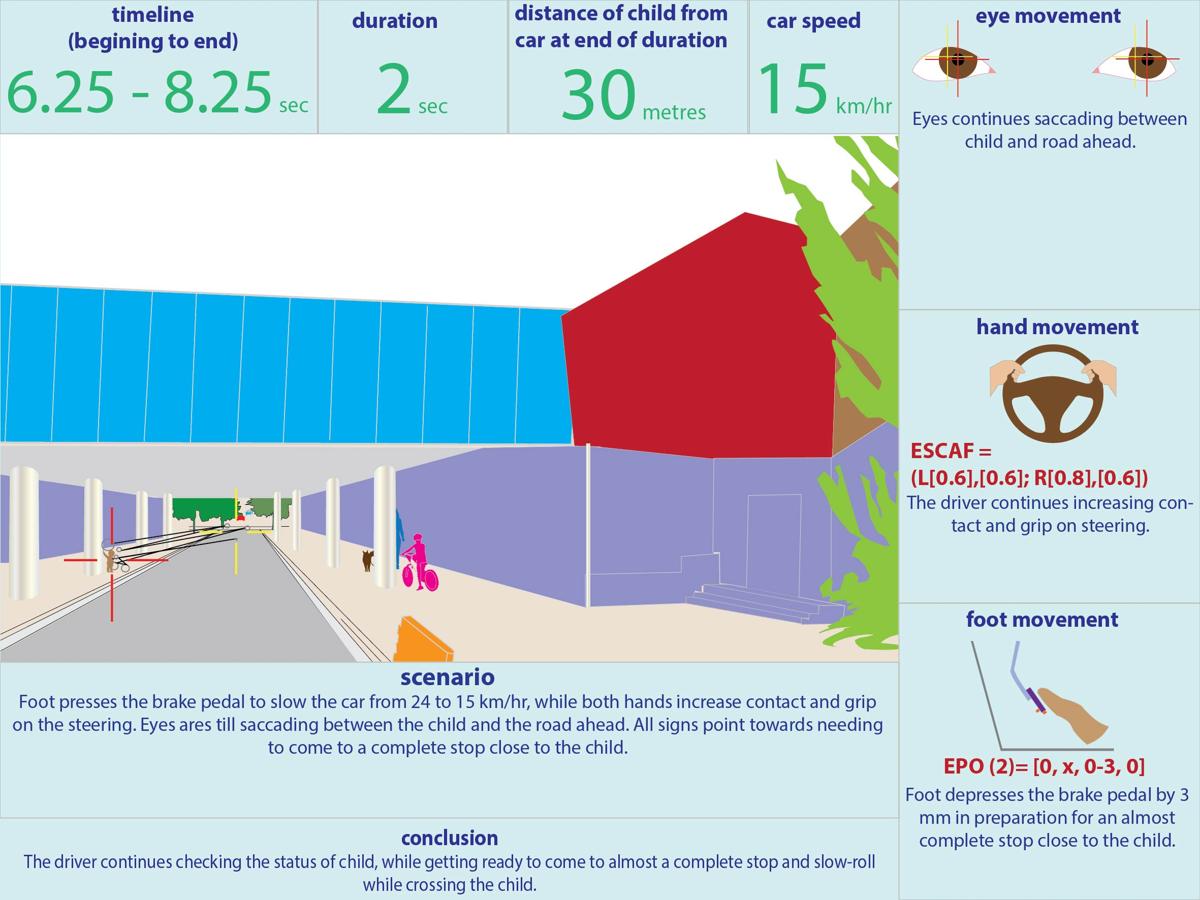
Examples of hand data ESCAF (Easy Steering Contact Area and Force) and foot data EPO (Easy Pedal Offsets) appears below:
ESCAF=(L[0.3][0.2]; R[0.6][0.4])
which indicates that the left hand has a total contact area 30% of the nominal full contact area (obtained during calibration) and 20% of the nominal maximum grip force, right hand 60% and 40%.
EPO=[15, 0, 0, x] which represents:
EPO: [depression of accelerator pedal- 15 mm, distance of foot from accelerator- 0 mm, depression of brake pedal- 0 mm, distance of foot from brake- x indicates ‘don’t care’].